





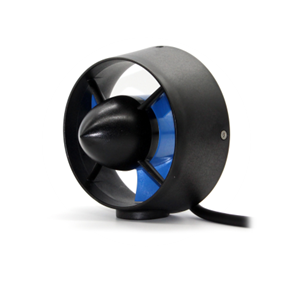
The Ping360 scanning sonar is a mechanical scanning imaging sonar. It’s designed primarily to be used on the BlueROV2 and other ROVs for navigation in low-visibility water conditions, but it’s also suited for applications such as inspection, obstacle avoidance, target location and tracking, autonomous systems development, and more!

When mounted on an ROV, the scanning sonar gives you a top-down view of the ROV’s surroundings. You can see echoes from objects like ropes, walls, dock pilings, rocks, shipwrecks, boats, fish, and any other structures or objects that reflect sound waves. With that, you have reference points to navigate from, regardless of water visibility, and you can locate important features in the water quickly. Here’s an example of a 120 degree sector scan showing a rope in front of the sonar:
If you’re new to scanning sonars, here’s how it works: inside the Ping360 is an acoustic transducer that sends a narrow beam of acoustic energy into the water and then listens back for echoes. That transducer is mounted to a motor that rotates it in one degree increments and as it does this it generates a circular image of the sonar’s surroundings with a maximum range of 50 meters (165 feet). The result is similar to what you might see from a weather radar on the local news or a laser scanner on an autonomous robot. Here’s an example of a scan of dock pilings straight ahead of the BlueROV2:



The Ping360 connects to the open source Ping-Viewer application for control and data display. Ping-Viewer runs on Windows, Mac, and Linux and can connect to the Ping360 through a direct connection to the computer or through the onboard computer on the BlueROV2.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}